
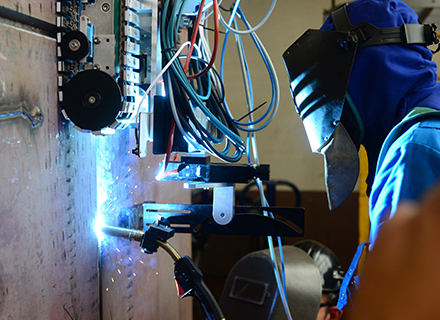
In the naval sector, the assembly of prefabricated blocks is carried out by manual welding, in a complex environment requiring the installation of expensive scaffolding.
The purpose of the CHARMAN project is to develop a stand-alone welding trolley with the capability to move and automatically adjust its path on vertical surfaces, and to correctly repair welding seams as a function of the section of the weld joint.
Results
This project ended in January 2016 with conclusive results for industrialists, which made it possible to launch a second collaborative research project aimed at achieving the industrialisation of the product, bringing together the Jules Verne IRT, Servisoud and the Chantiers de l’Atlantique.


Industrial impacts
- No need for scaffolding for edge welding operations: €300,000 saved
- Improved weld reproducibility and quality
- Lower risk of accidents and better working conditions
Valorisations
Expertise
- Robotics & cobotics
Partners
- IRT Jules Verne
- BUREAU VERITAS
- NAVAL GROUP
- SERVISOUD
- Chantiers de l’Atlantique
- LS2N (UMR CNRS, ECN, EMN, UNIVERSITÉ NANTES)